

2017 广州车展作为年底最后一场“汽车盛宴”,众多车企都开始发力推广新能源车型。随着科技的发展和政策的支持,我们可以预见未来几年汽车行业将迎来一场翻天覆地的变化。
以电为动力的新能源车型拥有噪音小、排放污染小、用车能耗成本低等优点,不过充电一直是个麻烦问题。需要自己寻找充电桩,手动打开插电口,并接电,着实不是很便捷。与我们一直构想的自动驾驶生活蓝图也很不搭。
那么有没有一种比较好的方法让汽车充电不那么麻烦呢?答案是肯定的,Qualcomm Halo 无线充电技术可以轻松解决汽车充电的麻烦问题。
不输有线的充电效率,使用更便捷
传统认知里,无线的速度一般比有线要慢,类似于手机无线充电技术,充电速度就比较慢,那换到电池容量大得多的电动汽车身上,充电速度会不会更慢呢?

事实情况并非如此,在实际使用中,充电速度的限制在于汽车能够接受多少电能。Qualcomm Halo 的运行功率有四种:3.7 kW、7.4 kW、11 kW 和 22 kW,这意味着它能够支持大功率的电动汽车无线充电,并且对不同底盘高度车辆有着较强的兼容性。

它的技术原理有点类似于手机的无线充电设备,在汽车和地面上分别放置接收源和发射源,两个信号源发生重叠时即可充电。通过发射源,将交流电转换成磁场,再由接收源转换成直流电,让系统跨越空气间隔实现最大功率传输,传输效率可达到 90%。有线充电由于交流电到直流电的转换和充电接口的低效率等因素,充电效率大约是 95%,和 Qualcomm Halo 无线充电效率相差很小。但 Qualcomm Halo 无线充电却比有线充电便捷很多,你只需停完车走人就好,而不是下车找插头再插上。
无需精准对接,大大提高了便利性
可能有人要替新手司机问了,那这个是不是对停车技巧要求更高了,万一停车的位置并没有精准对接上地上安置的发射端,充电效率是不是要大打折扣?
显然,你想到的,Qualcomm 的工程师们也考虑到了。Qualcomm Halo 无线充电技术是利用磁共振效应来对电动或混合动力车型进行非接触式充电。磁共振无线充电技术最大亮点是无需精准对接,充电板与接收板之间允许有位置误差,这也降低了驾驶者寻找精准停车位置的难度,大大提高了便利性。
动态充电,让充电更便捷
今年 Qualcomm 还在巴黎发布了一种新型的电动汽车动态充电技术(DEVC),电动汽车可以通过嵌在道路表面的充电模块进行自主充电。车辆每经过一块充电模块,模块就会为汽车电池提供一定能量,如果一整条道路上布满这种模块,理论上来说,电动汽车将得到源源不断的能量供应。
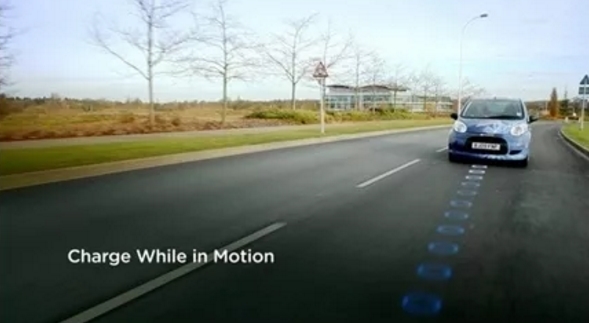
目前, Qualcomm 已经用一台电动车完成了一段 100 米长的道路测试,车辆底盘安装了 2 个 10 kW 的高通无线充电接收板,把接收到的电能从交流电转换为直流电,并传输给电池。在 100 km/h 情况下,能达到 20 kW 的无线充电功率。此外, Qualcomm 还成功示范在轨道上的两部车同时同步充电,让车辆可在轨道上进行双向充电,凸显 Halo DEVC 系统已可用来支持现实环境的动态充电技术需求。

相比停车无线充电,此次 Qualcomm “动态”无线充电技术的推出,无疑更具“革命性”意义。
