

Qualcomm 一直扮演着芯片制造商的身份,但在全球芯片市场趋于饱和的状态下,车载成了Qualcomm新的目标。为了在车载领域分一杯羹,Qualcomm与松下开发了基于骁龙820新时代的车载信息娱乐系统。
软件方面和google合作开发,此车载系统基于android,google公司为了让系统变得更加安全和稳定,对系统进行了许多深度定制。
小编所在公司有幸参与了骁龙820A开发板的相关开发工作,对其中的vehicle_network_service有些见解,再次分享出来,以供大家参考。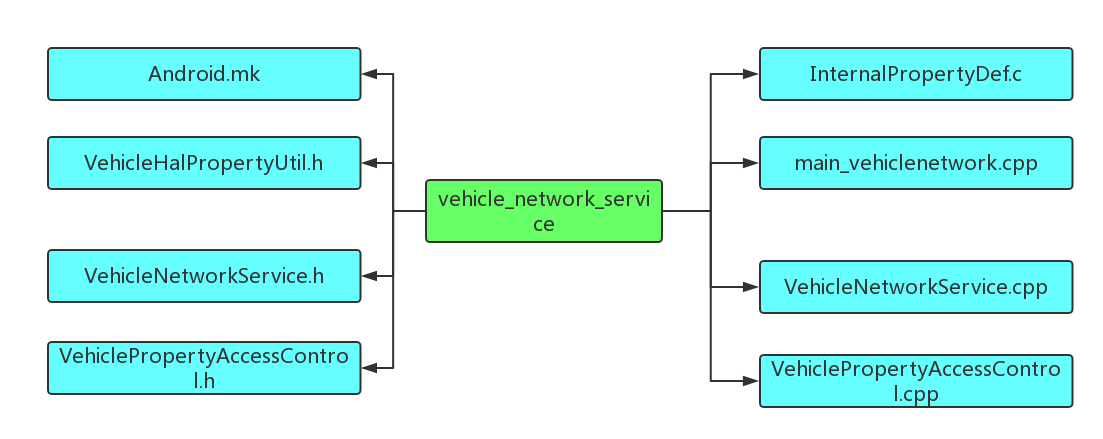
Android.mk
Android.mk是Android提供的一种makefile文件,用来指定诸如编译生成so库名、引用的头文件目录、需要编译的.c/.cpp文件和.a静态库文件。
总体来说Android.mk定义了该模块的编译方式。
Android.mk引用的文件包括lib文件,编译所需文件还有头文件,引用的文件如下所示:
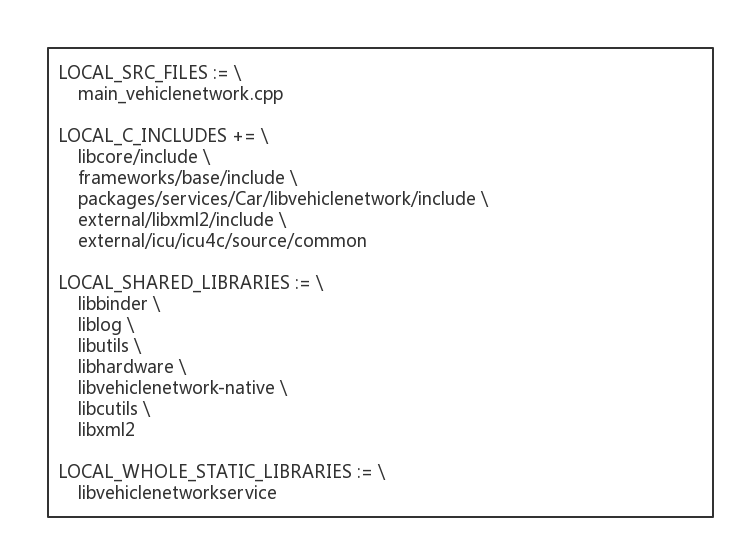
从上图代码可以看出,这个模块最重要的文件是main_vehiclenetwork.cpp。
Android.mk编译的目标是可执行文件,也就是说adb shell 之后,可以用./执行该文件。

main_Vehiclenetwork.cpp
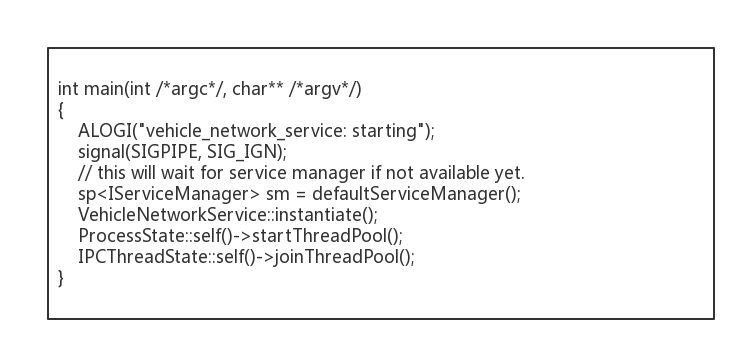
main_Vehiclenetwork是该模块的程序入口,里面四个关键函数如上图所示,分别为defaultServiceManager(),instantiate(),startThreadPool(),
joinThreadPool()其中defaultServiceManager(),startThreadPool(),
joinThreadPool()比较常见。
defaultServiceManager()
defaultServiceManager()返回的是IServiceManager对象,获取IServiceManager对象之后就可以和ServiceManager进程进行通信。在骁龙820A里面,这个ServiceManager就是VehicleNetworkService。
具体实现代码如下:
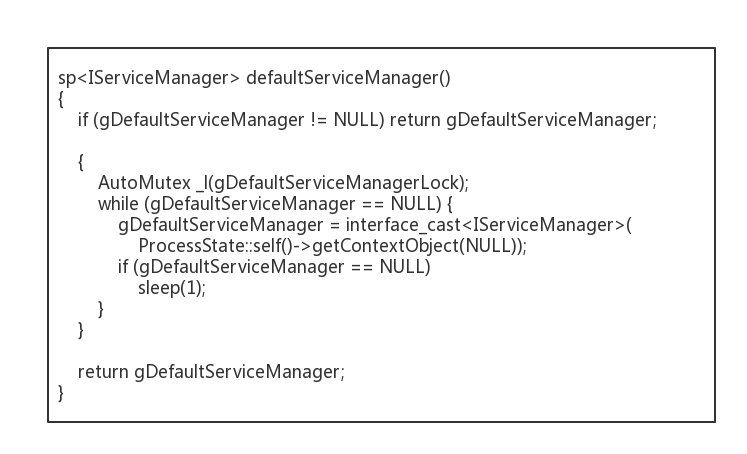
其中,gDefaultServiceManagerLock是全局互斥锁,gDefaultServiceManager是全局的IServiceManager对象。
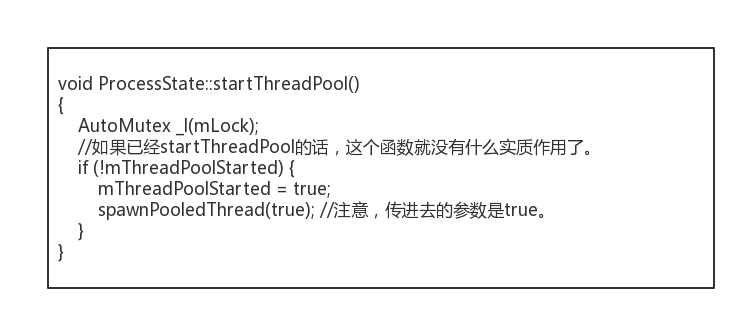
startThreadPool()
startThreadPool()函数调用spawnPooledThread,然后spawnPooledThread调用PoolThread,接着返回一个Thread对象,最后实现Thread里面的run方法。此时骁龙820A车载系统就进入binder事物循环了。
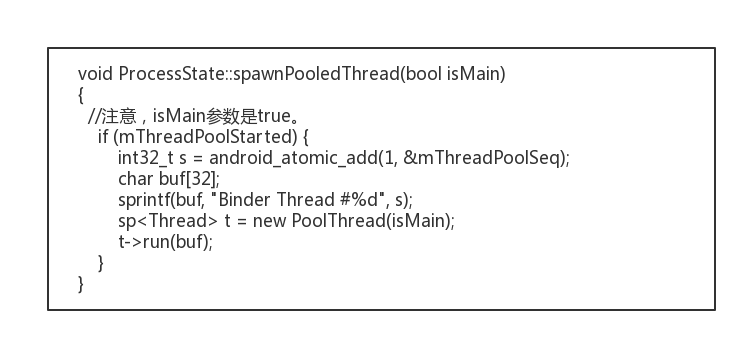
调用spawnPooledThread代码如下:
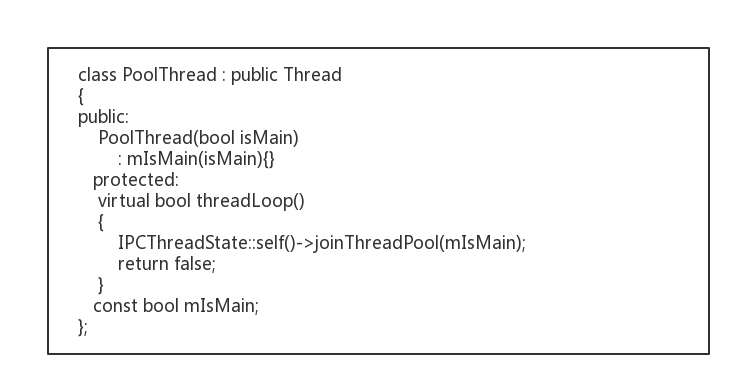
spawnPooledThread调用PoolThread代码如下:
PoolThread的实现方式
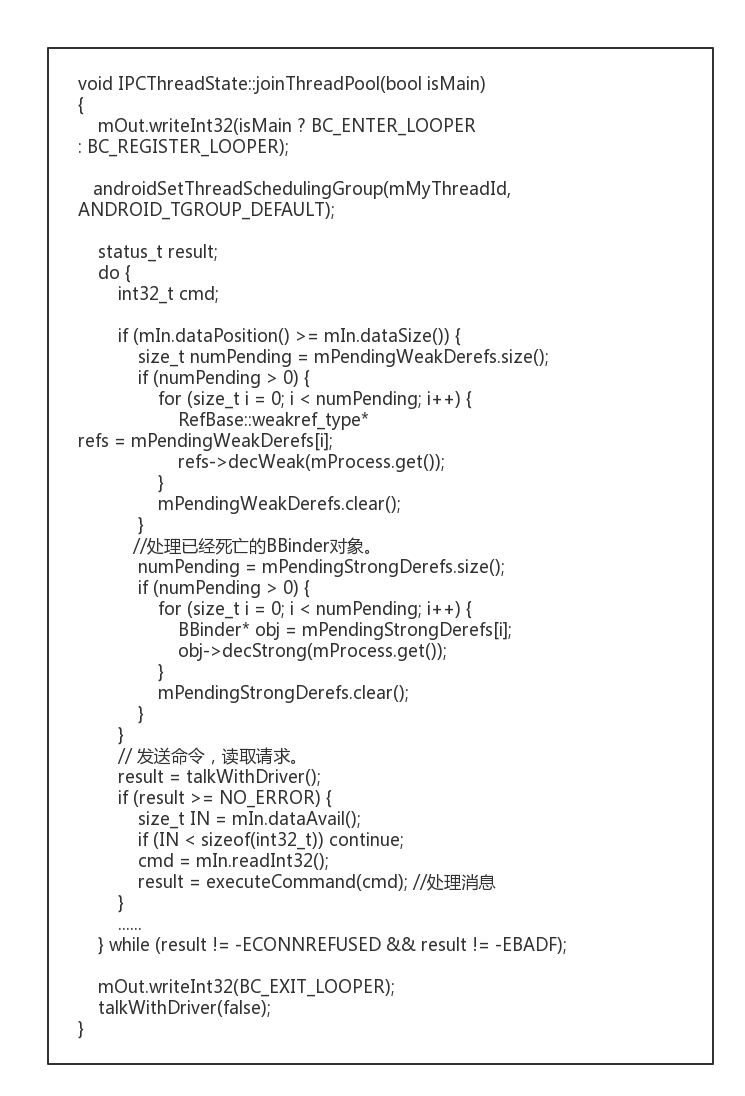
joinThreadPool()
startThreadPool中新启动的线程通过joinThreadPool读取binder设备,查看是否有请求。主线程也调用joinThreadPool读取binder设备,查看是否有请求。
总结
main_Vehiclenetwork.cpp里面最具车载特色的是instantiate()方法,可以拿surfacefliger举个例子
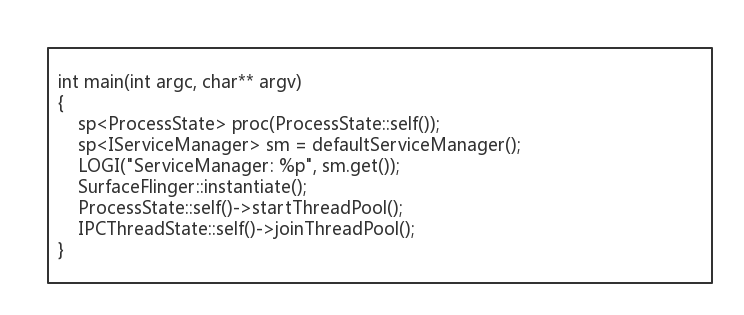
其中最重要的是SurfaceFliger::instantiate()方法,是不是看起来和我们的车载模块的函数入口差不多。所以想要了解骁龙820A的VehicleNetworkService::instantiate(),就必须深入了解VehicleNetworkService,小编会在以后的文章中体现哦,欢迎大家一起探讨。
Qualcomm汽车技术讨论组 QQ群号:566131670
