

近日,高通公布了首款专门面向蜂窝车联网(C-V2X)通信的,基于3GPP Release 14规范的商业化芯片解决方案——9150 C-V2X。该芯片可以实现汽车实现与周围环境之间的沟通,以提高主动安全性能和驾驶辅助系统。官方消息称,“9150 C-V2X” 预计在2018年下半年进入商业化抽样阶段。
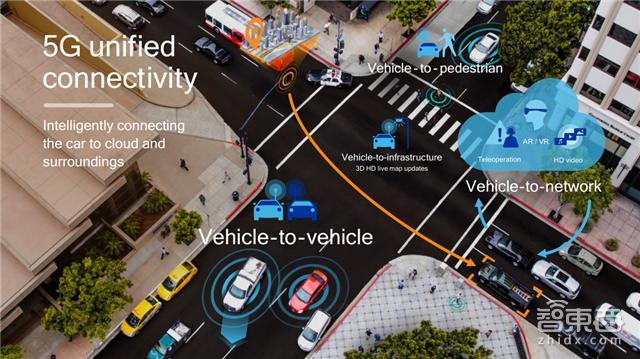
车联网,即V2X(Vehicle to Everything)是汽车与互联网(V2N)、汽车与汽车(V2V)、汽车与基础设施/道路等(V2I)、汽车与行人通信(V2P)的统称,主要的通信技术分为IEEE 802.11p(802.11的扩充延伸,DSRC的底层技术)和3GPP C-V2X(基于蜂窝网的V2X无线通信技术)两类,前者技术相对成熟,后者前景更为广阔。
本期的智能内参,我们推荐来自高通的蜂窝车联网商业化报告,盘点5G统一网络的前景和车联网的技术演进史,剖析蜂窝车联网的现状、生态和前景,并对9150 C-V2X进行了剧透。如果想收藏本文的报告全文,可以在智东西(公众号:zhidxcom)回复关键词“nc190”下载。
以下为智能内参整理呈现的干货:
一、自动驾驶三要素
中国工程院院士倪光南:车联网是走向自动驾驶的必然的道路。


*车联网/自动驾驶需要面临的实用难点(视觉死角、变道、情境意识)
未来的汽车是怎样的?有三点:首先,必定是V2X;其次,是提升车内体验;最后,是平缓的道路自动行驶。自动驾驶的本质,是对车辆信息的优化,是对多传感器/信息源的融合,而这些功能的实现,离不开:5G(V2X)、三维建模和精确定位,以及车载智能。
5G:从802.11p/C-V2X R14到R16

*5G车联网技术演进
其中,5G的发展既要面向新的需求(能更多地利用非授权频谱LTE,并与Wi-Fi的融合,以应对实况中连通目的和传感器数据的需求),又要考虑对旧的通信技术的兼容性(基于4G LTE)。
*C-V2X 面向自动驾驶的技术演进(从R12/13到R16)
因此,车联网初期将会从比较安全的802.11p或C-V2X R14技术(R指Rrelease,以LTE-R14技术为基础,LTE-V-D和LTE-V-Cell加持,带宽10MHz);然后是扩大范围和可靠性(不影响其他LTE网络),即C-V2X R14/15技术;接下来,就要考虑更高的吞吐量和更高的可靠性,宽带、定位、低延时的,基于R14的C-V2X R16(带宽70MHz以上)。
定位:全靠GNSS撑场子

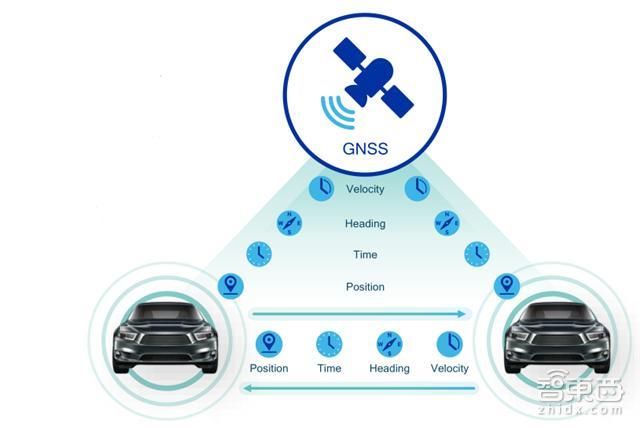
*GNSS之于车联网
需要特别指出的是,高精度的定位对于车联网而言至关重要,这里就涉及了全球导航卫星系统GNSS定位服务(精度<1米)及其实时的信息传输,并根据GNSS信息对车速、车头方向进行实时的调整。
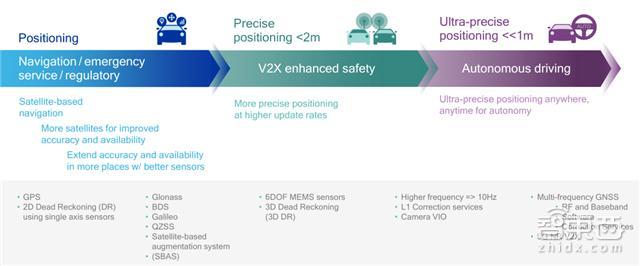
*定位技术面向自动驾驶的技术演进
想要实现自动驾驶级车联网,基于多卫星(以提高精度并扩大覆盖)的GNSS的定位精度需要达到亚米量级,城市传感器分布需要更密(包括城市环境、车库、多层停车场等),以及更高频(至少100毫秒)的信息刷新。
车载智能:数据整合成汽车之脑
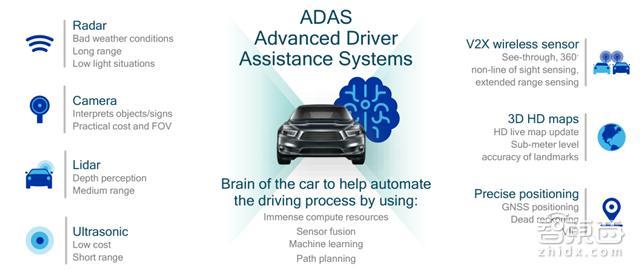
*ADAS技术剖析
再来看车载智能,也就是面向更高层次的可预测性和自主权,即高级驾驶辅助系统(ADAS),可谓自动驾驶汽车的大脑。ADAS的实现需要对雷达、摄像头、激光雷达、超声波等多传感器数据,和来自车联网的无线数据,以及3D高清地图、高精定位信息进行整合处理,并给出驾驶指令。
二、深扒蜂窝物联网
什么是C-V2X?
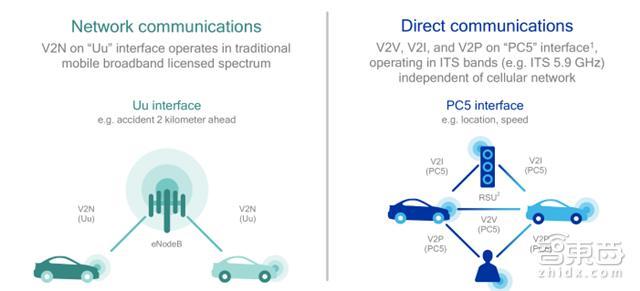
*C-V2X的两种传输模式
C-V2X有两种传输模式:网络通讯(V2N),即在Uu界面上采用授权移动宽带频谱,比如预告前方两公里处的车祸;另一种就是直接通讯,此即PC5界面的V2V、V2I和V2P,采用智能交通系统频段(如ITS 5.9 GHz:受3GPP支持,频段更安全,可与802.11p同时存在),独立于蜂窝网络,可用于定位和速度测调。
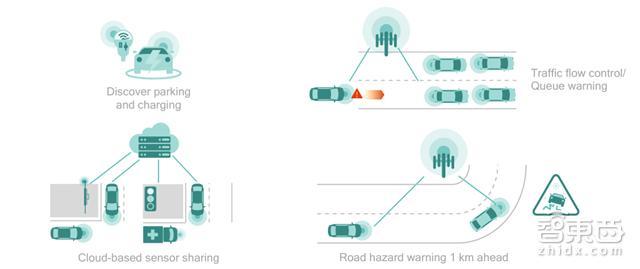
*V2N用例示意
首先来看V2N的低延时用例,主要在于远程信息、娱乐信息和安全信息,包括发现停车场和充电桩,交通管制和车流信息预警,基于云的传感器共享,前方(1公里)道路危险警告……
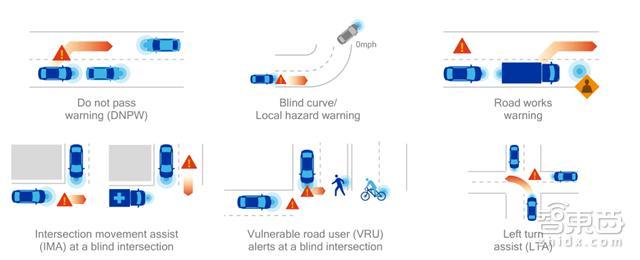
*直接通讯用例示意
直接通讯(V2V、V2I、V2P)方面,不需要识别卡(USIM),会自动的对信息源进行筛选,采用无需网络的分布式调度,主要依赖GNSS的实时定位。其用例包括附近有车变道时的不通过警告(DNPW),视觉盲区的局域风险警告(拐弯处前车运行状况预警),道路施工预警,交叉路口会车预警(IMA),事故高发路段预警(VRU),转弯助手(LTA)……

*基于自管理的直接通讯比基于网络的更有优势
基于ITS频率自管理的直接通讯能利用移动生态系统和现有的工程技术、资源和解决方案,新老技术间的关联性可避免技术演进周期的断层,设定好的嵌入式调制解调器可降低成本和技术复杂度,同时可靠性更高。
为什么说C-V2X比802.11p更有前途?
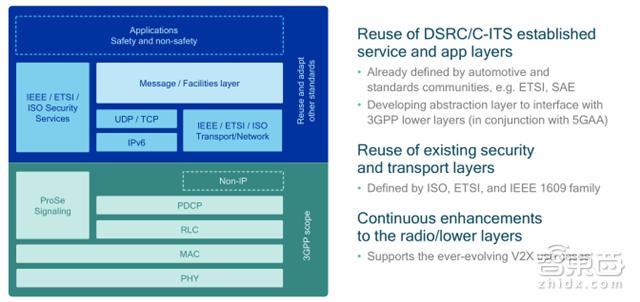
*C-V2X服用汽车行业上层模块
对于整个产业生态和社会经济效益而言,C-V2X的好处在于提供了更多的集成化解决方案(最优调制解调器),整合RSU(路侧单元)和eNodeB(基站)以减少调度成本,融合了专业的移动生态(包括布局、管理和维护),并提供了新的服务和商业机会(程信息处理服务、地址共享迁移、自动驾驶等)。
相比于目前技术比较成熟的DSRC 802.11p(专用短距离通讯),在同样的频段上:
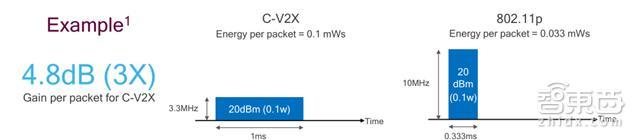
*C-V2X与802.11p链路预算对比
1、C-V2X每节点传输所需能量和时间更少(减少链路预算),支持更高密度的信息;
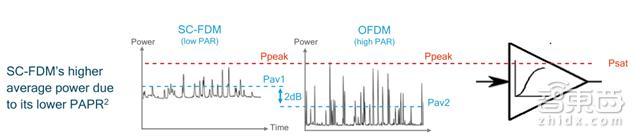
*使用相同的参数放大器,传输效率比OFDM好了2dB
2、资源块组合降低了峰值平均功率比,因此传输效率更高;
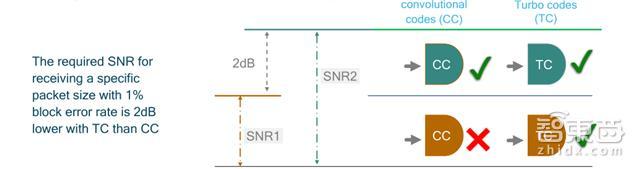
*涡轮码(C-V2X)比卷积码(802.11p,K=7)好了2dB
3、可以进行信道优化,更为安全可靠。
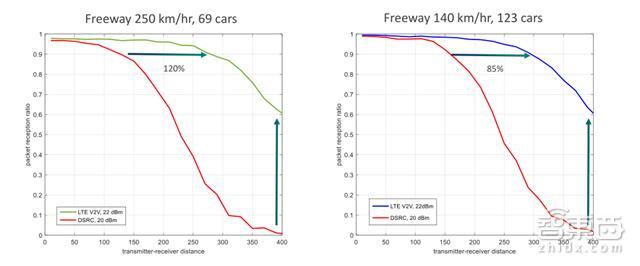
*LTE(C-V2X)与DSRC(802.11p)自由场景的范围和可靠性对比(考虑双向6车道的自由场景,针对车辆行驶速度和汽车数量进行模拟计算)
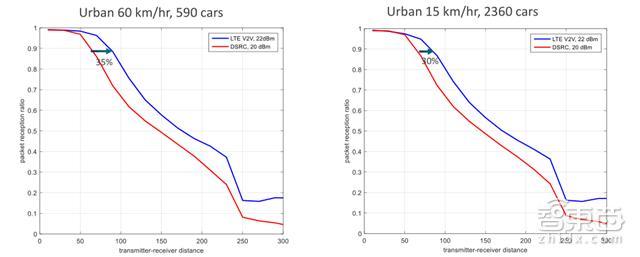
*LTE(C-V2X)与DSRC(802.11p)自由场景的范围和可靠性对比(考虑双向4列350米宽车道的有十字路口城市场景,针对车辆行驶速度和汽车数量进行模拟计算)
总而言之,C-V2X比之802.11p,能够整合Wi-Fi、3G/4G等各种网络资源,包括更高级别的DSRC/C-ITS,覆盖范围更广(近两倍);可靠性更高;高密度、低延时,速度更快;能够通过自我管理减少成本和技术复杂度;可扩展,支持远程信息处理平台。
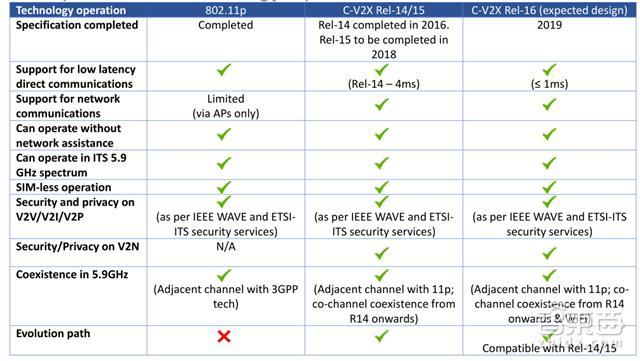
*802.11p、C-V2X Rel-14/15、计划中的C-V2X Rel-16技术操作对比

*802.11p、C-V2X Rel-14/15、计划中的C-V2X Rel-16射频设计对比
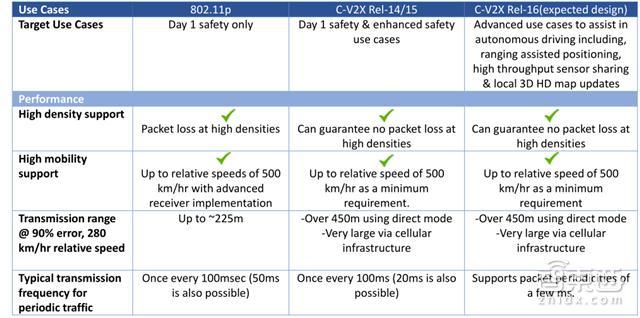
*802.11p、C-V2X Rel-14/15、计划中的C-V2X Rel-16用例和性能对比
此外,C-V2X更为符合现有产业生态(复用重用服务和应用程序层、安全和传输层,强化无线电/低层),是面向5G演进的强大路径。

*C-V2X获得了汽车产业、5GAA联盟、电信的支持

*C-V2X需建立的综合性生态
三、剧透:9150 C-V2X芯片集
*C-V2X设计考量:高层需调整拥塞控制参数,低层需优化访问控制和资源调度

*优化访问控制和资源调度:选择耗能低的模块以满足低延时要求
高通执行副总裁兼QCT总裁 Cristiano Amon (克里斯蒂安诺•阿蒙)指出:5G和LTE路线图使调制解调器和射频前端复杂性显著提高。从高通的角度而言,要实现5G的成功,除了射频前端外,还需要同步对不同领域的技术进行大量投入,包括5G新空口、千兆级LTE、授权频谱和非授权的LTE LAA(LTE授权辅助接入)以及Wi-Fi向MU-MIMO、802.11ad的演进等。

*9150芯片集预告
而现在,高通已经预告了,要发布首款基于3GPP R-14的,面向PC5直接通讯的蜂窝车联网商业化解决方案——高通9150芯片集,集成了GNSS模块、无线模块(运行ITS栈)和硬件安全模块。

*9150芯片集设计
高通9150芯片集工作频段为ITS 5.9GHz,支持V2V、V2I、V2P,支持GNSS,预集成面向V2N操作的远程信息处理模块,支持无SIM操作,通讯范围更远,可靠性更强,对密集车流调度进行优化,针对弱势道路用户VRU和路边单元RSU设计。据称,该芯片将于2018年下半年进入商业化采样阶段。
奥迪的Thomas Müller博士将9150 C-V2X芯片集称为5G自动驾驶里程碑式的存在,标致的高级副总兼创新部负责人Carla Gohin表示标致将于高通一起探讨蜂窝互联网的可行性并采用之。
智东西认为,车联网或者说自动驾驶对于多传感器、硬件设备、基础设施等及其之间的信息交流提出了严格的要求:宽带、低延时、高精度、高刷新等等,庞大的数据量要求本地、云端的合作(参考高通提出的自管理的直接通讯),高通9150芯片集从通讯的角度对此进行了商业化的探索,可以说是推了行业一把。此外,庞大数据量可能的人工智能/深度学习解决方案,也让我们对于车联网本地解决方案的更多可能性有所期待。
值得注意的是,近日,《国家车联网产业标准体系建设指南(信息通信)(征求意见稿)》提出,“十三五”期间重点研究制定天线技术、电磁环境兼容性等基础技术体系,制定基于LTE-V2X的无线通信网络建设及关键技术标准体系,探索5G技术在车联网产业领域的应用。具体分为两个阶段:2018年底前完成基础性技术研究,建立基础性技术标准体系,并形成基于LTE-V2X的关键技术标准体系,制定、完善车辆紧急救援、通信安全等重点标准体系建设,针对标准开展试验验证。到2020年完成5G支持车联网产业系列标准的制定,进一步完善健全信息通信安全与数据安全等标准。
