

看到上面那辆实用的家用汽车停在你的车位上了吗?没错,这是一辆搭载Qualcomm Halo无线充电技术的电动汽车。是的,该无线电动汽车充电技术将从赛车世界走来,很快将集成在日常驾驶的汽车上。
从赛车道到高速公路
五年前,Qualcomm Halo WEVC技术就一直在严酷的比赛环境下,比如国际汽联Formula E系列赛中进行测试。搭载Qualcomm Halo WEVC技术的FIA 赛车经过在Formula E赛事中经过严格测试和实际验证。这确保了他们随时保持完全充电,随时准备在紧急情况下迅速部署。今年Mercedes AMG Petronas车队更是获得了冠军,在短期内证明WEVC的商业力量,引起了业界广泛的关注。
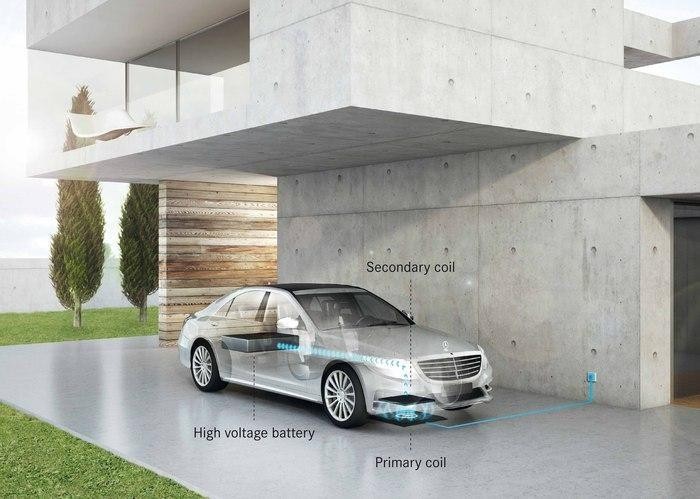
随着Mercedes-Benz s550e 2018的改版,戴姆勒公司计划推出一辆集成来自Qualcomm Halo技术发明授权的汽车。这是WEVC技术第一次在混合动力汽车上的商业应用。配备无线充电选项S550E的汽车(欧洲版型号是S500)可以停泊在特殊充电桩上并启动充电,没有电缆真正做到“停车即充电。”
从WEVC到DEVC
Qualcomm Halo使用共振磁感应将能量通过无线方式传输到另一个集成在汽车上的接收桩,能量迅速而安全地转移到汽车电池上。同样重要的是,能量传输效率-Qualcomm Halo技术高达导电充电的90%的效率评级,正是Halo的效率提高,使得无线充电的实用化成为现实。无线充电技术使得真正意义上的无人驾驶成为可能。
Qualcomm 致力于汽车技术创新,电动汽车无线充电(WEVC)功率大致分为四种:3.7kW、7.4kW、11kW和22kW。Halo无线电动汽车充电(WEVC)技术是Qualcomm发明的一种专门针对电动汽车(EV)的简单、高效的充电方式,由此将会创建一个更清洁、更智能的未来移动城市。Halo支持大功率的电动汽车无线充电,还支持低底盘和高底盘车辆;它简单且方便操作,采用标准化85kHz工作频率;它还具有异物侦测、电磁兼容性(EMC)、射频和其他安全特性,保障行车安全。
在今年广州天翼展上Qualcomm展示了,无线充电技术核心实物产品核技术。

Halo可以支持多种充电模式。值得一提的是,Halo不但可以支持静态充电(车辆静止状态),而且支持动态充电(高速行驶状态)和半动态充电(慢速行驶状态),如车行驶到十字路口,红灯亮起,车速慢慢的从动态到静态之间的这一段时间。

想象一下未来你在高速公路上的电动汽车上,在开车的时候可以充电,想象一下你在缓慢移动的出租车队列中的时候,也能让你的车充电。Qualcomm Halo动态电动汽车充电(DEVC)技术使这些情况成为可能。基于我们的WEVC技术,汽车需要停下时候充电,而DEVC技术则可以保证行车过程中也能够充电--这项技术已经获得测试和验证,应该在不远将来就可以得到更广范围的部署。
据Qualcomm 新西兰有限公司工程总监Michael Kissin说:“Qualcomm Halo将提供技术帮助推动变革以造福汽车行业,推动未来的客运车辆使用这项技术。” 现在QTI已设计建造和测试DEVC系统,能够在20千瓦下为时速超过100公里/小时的电动汽车动态地充电。 Qualcomm Halo DEVC 技术是基于Qualcomm 的奥克兰设施进行研究的成果,实验证明Halo WEVC技术是适用于动态充电。更为惊喜的是可以两辆车同时充电。

同时由欧盟委员会支持的FABRIC也同步进行中,目的是解决技术可行性,经济可行性,以及无线DEVC社会环境的可持续发展。也就是说作为进行无线DEVC可行性分析的范围扩展的一种手段,让电动车驾驶者更多的自由,而不必担心到达下一个充电站前电池不够的问题。
从奥克兰开始,在进行FABRIC项目安装之前,经过了专门的工业化设计。这个过程对原来设计进行了微调,进一步关注材料的成本,确保这是一个技术和经济方面都是有竞争力的解决方案。
DEVC演示是在巴黎附近的Satory,Versailles的100米测试轨道上进行的,该测试样路由Vedecom建造。QTI慕尼黑工程队和Vedecom安装测试赛道的Qualcomm Halo DEVC系统的主要部分,Vedecom和雷诺安装第二部分。Qualcomm Halo DEVC系统被移交给Vedecom进行试验。
DEVC实验路组成及其工作原理
这里是构成完整的Qualcomm Halo DEVC系统在FABRIC的组成:
100米跑道,由4组25米的组成,每一个都由自己的电源供电。
每组将14个基本阵列网络(Base Array Network,BAN)块耦合到主干电缆中。
功率通过空气间隙传输到位于EV之下的两个10千瓦的车辆充电板(Vehicle Pads,VPS)上。车辆系统转换85千赫交流电为电动车的电池管理系统要求的直流电源。
Qualcomm Halo技术的设计考虑到了互操作性。这意味着司机可以在任何兼容的WEVC充电站为汽车充电,与供应商提供的硬件和汽车无关。充电桩(BP)磁支持不同的传输功率水平和不同的车辆底盘高度(从SUV到跑车)。安装可以采用地表和埋入式安装。
目前Qualcomm授权汽车制造Tie 1 供应商以及电动汽车基础设施供应商。公开宣布授权厂商越来越多了:chargemaster、Efacec, Brusa, Ricardo, Lear, Lumen, 和Preh。高通副总裁兼无线充电总经理Steve Pazol表示“一个全球的专家工程师团队和高通Halo技术的组合,为我们真正推动了未来城市可能的界限和勾画了未来城市交通的愿景。”
Qualcomm汽车技术讨论组 QQ群号:566131670

