

世界各地的道路面临日益严重的交通堵塞,没有继续扩张的能力,因此,交通和排放是主要问题。即使你不开车,即使你完全没有计划买车,你也有可能每天都与汽车互动。事实上,汽车对现代生活产生了巨大的影响,商业车辆也同样如此。因此,汽车行业的大规模变革将导致我们日常生活的巨大变化,希望把宝贵的时间和金钱还给我们。
这听起来有点像炒作,但想想智能手机的引入,世界发生了多么巨大的变化。事实上,从手机到智能手机的转变是汽车工业目前所面临的变化的恰当类比。骁龙汽车解决方案借鉴了从我们的移动技术领导收集的见解,并将其应用到连接的汽车。事实上,汽车在未来很可能是一个巨大的智能“手机”车。
据悉,C-V2X技术于2017年开始测试,发展速度迅猛,有更多商用解决方案在陆续发布中,如第一个基于3GPP Release 14的C-V2X项目的德国ConVeX项目;向实现5G进行的C-V2X直接和网络通信的法国Towards 5G测试;以及在2018年实现全球范围内规划,使C-V2X能够走向英国、美国、日本、韩国和中国。
在短期内,这意味着支持先进的远程信息处理功能,不仅支持传统的诊断和通知,而且使新的应用程序更有效和更安全的驾驶。如果你不熟悉的术语“远程信息处理(telematics),“这是“通信(telecommunications)”和“信息(informatics)”的一个组合。
在汽车上,它指的是任何系统数据收集、处理流程、数据传输:比如GPS系统、远程车辆诊断、自动碰撞通知等等。最重要的是,通过Wi-Fi和LTE的无缝结合,我们对连接汽车通过提供卓越的汽车连接的汽车平台的各类车辆通信的下一代搭建舞台。
稳定和通畅的通信连接是保证汽车自动化的重要基础。更加重要的是,C-V2X也获得了汽车和通信行业领军企业的支持,通过提供车辆平台、硬件和软件解决方案的汽车行业,以及连接和联网系统、终端与技术的通信行业,获得面向智能交通系统与智慧城市的端到端解决方案。
随着V2X (V2V、V2I,V2P的总称)和V2C通讯、车辆彼此间的信息共享与环境的信息共享,将会使驾驶更安全,更有效。
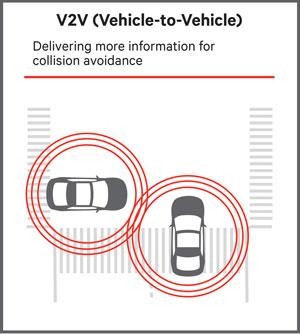
V2V(车-车通信Vehicle-to-Vehicle):类似DSRC这样的通信技术与非视距和延迟敏感的防撞能力将使驾驶员、乘客和路人都可以获益。

V2I(车-设施通信):连接汽车基础设施通信提供了多种应用,包括安全、道路上的信息,和互动性。
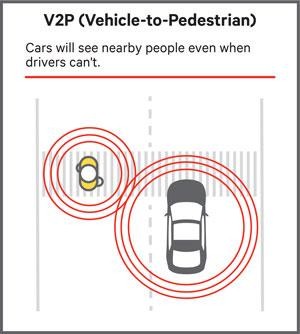
V2P(车-行人通信):司机和行人都能收到警告防止预期预计的碰撞。行人通过智能手机应用程序或通过连接的可穿戴设备接收警报。

V2C(车-云通信):基于云的安全、信息、娱乐、接车服务,使驾驶更高效和愉快的。
不知何时,自动驾驶已经不再是遥不可及的事情,Qualcomm的理念是希望通过自己的力量,让未来的自动驾驶能够实现智能连接、高效共享、汽车自动化以及提高自动化水平。
在未来几年和未来十年中,我们可以看到越来越多的连接功能支持车辆的安全特性和半自治车辆系统。最终,我们的汽车甚至可以完全自我驾驶。拥有自治和半自治车辆的好处显而易见:更安全的道路、更高的燃料效率、全城市的交通管理和减少排放将是变革性的,先进的连通性是这一现实的重要组成部分。
5G,将是实现未来汽车愿景的重要源动力技术,它不仅能为自动驾驶带来增强型移动宽带,还能提供关键业务型服务和海量物联网。对于未来创新的统一连接平台,联网汽车平台始于当前的千兆级LTE、C-V2X(Rel-14)及海量物联网深度覆盖。
Qualcomm汽车技术讨论组 QQ群号:566131670
