

大家知道十字路口经常是事故多发地点,特别是现代城市高架桥,地下通道等等复杂的设计加上司机、行人的抢红灯、黄灯的行为,更加使得十字路口成为事故多发点。那么为何十字路口就成了马路杀手呢?
对于驾驶员朋友都知道,由于车辆设计天然存在这样的盲区,目前几乎所有的车都存在前挡玻璃两侧立柱盲区,尤其是离驾驶席最近的左侧柱,其实左侧柱相当于在你500px的地方有一根电线柱。当行人车辆在“柱”子后面的时候,肯定无法看到,如果驾驶员疲劳或者粗心,很容易造成车祸。轻则负伤,重则丧命。如下图,右侧前方摩托车行进时显然被右前方车辆挡住,黑色车辆没有减速造成了严重事故。
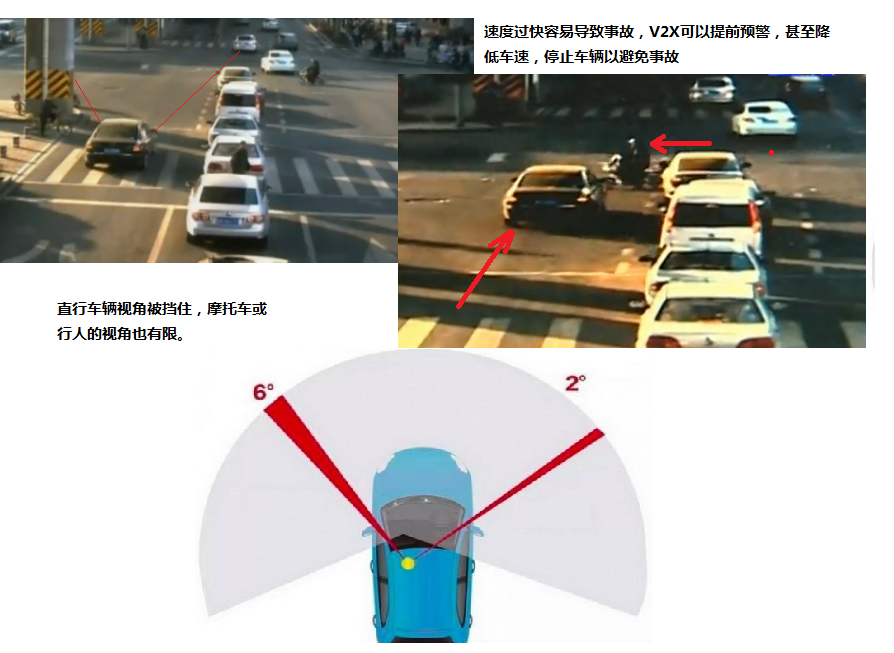
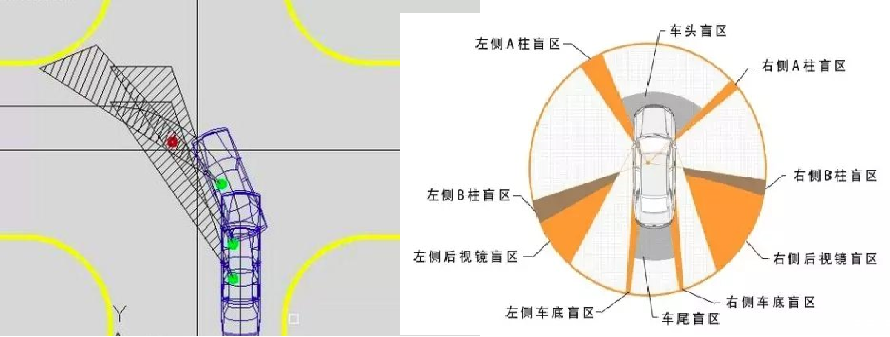
此外,人行道绿灯的时候,左转弯车也是绿灯,这个时候你要是跟着左转车的步调行进将非常危险。这样你可能一直在这台车的盲区范围。更不要在左转弯侧的行进路线上站定。我们学车的时候师傅首先一定会告诉你盲区,车头、车尾和两侧车底盲区,都是半盲区。车底盲区,在两侧的侧裙和后轮附近,即一般后视镜所具有的下方盲区。如果孩子进入这些盲区,驾驶者会比较难发现,危险性尤其大。
这些都是无法避免的盲区,通常只能在操作上更小心,减速慢行通过。那么就没有办法解决了么?令人振奋的是,目前V2X技术中正有专门为此设计的安全保护。
今天的车辆配备了许多传感器,如雷达,激光雷达和摄像系统,以此来更好的感知它们的周围地区环境变化。之前我们对V2X技术做了具体的介绍,并介绍了前向冲突碰撞告警(FCW)和禁止超车告警(DNPW)的工作原理和作用。FCW和DNPW相对来说属于可视范围内,但是如果非可视的条件下,那V2X协同式环境感知系统如何来做出判断,如何来防范潜在的风险呢?
显然,这些传感器受到它们视线的限制,仍然不能看到拐角处或前面的大型障碍,如卡车。它们也会受到环境条件的影响,如浓雾,雨,雪天气等,这些都会影响传感器的使用。基于无线电的V2X的促进,作为一个传感器融合的一部分,必须向司机提供全天候、360度超视距(BLOS)感知,并延伸车辆的能力来检测超出他们视野范围的异常,以至于能够更好地支持安全驾驶。
下面重点介绍C-V2X如何为安全通过十字路口盲区所带来的全新体验。
C-V2X:为未来的自动驾驶铺路
业界普遍认为,发展Cellular-V2X(C-V2X)是现代V2X的技术大趋势。根据不同场合的部署情况,部署也非常灵活。C-V2X可以部署在尚未部署任何V2V技术的地区[这句话的本意是什么?看的不是特别明白,理点]。也可以和现有V2V技术很好的结合,即可以部署在已有V2V部署的地区。
Qualcomm设计的C-V2X是3GPP Release 14中的传输技术,它可以和SAE与ETSI-ITS的上层相结合来提供卓越性能,提高安全性,新功能将支持[这是有个论上即使部署了V2V,C-V2X也是可以部署的,单这不是C-V2X的一个特别的明显的优英文原文的?原文是什么?感觉不大通顺~]情景感知以迎来增强安全和自主驾驶时代的新时代。Qualcomm设计的C-V2X和802.11p相比有着更大的预警距离(约两倍),并允许车辆进行数据交换,如紧急警报和它们的位置和速度,可以做到以每秒10次的速度进行消息传输,以便更好的避免碰撞。
无法看清路况时C-V2X对车辆的辅助
驾驶员视觉辅助的想法是为驾驶员提供一个增强的视觉,以便他们能够更早地检测和识别危险物体,而不是等到实际对象临近了才察觉到。但是由于视觉辅助没有目标识别过程的功能,它不会分析错误的识别结果,即使再先进的研究这也是不可避免的。
V2X技术在驱动自动驾驶汽车愿景方面一直发挥着关键作用。虽然雷达、激光雷达和摄像系统的发展已经支持自动驾驶向商用化迈出了重要一步,但这些传感器还仅限于视距(LOS)数据采集。融合V2X传感器有望补充并增强上述功能,提供360度非视距(NLOS)感知,进一步拓展汽车在道路上的“视听”范围, 覆盖十字路口盲区并且可以在恶劣天气条件下正常工作。通过与高精度的全球导航卫星系统(GNSS)相结合,V2X技术将有望支持车辆与车辆、基础设施和行人智能手机之间的信息共享。

C-V2X为车辆提供360度的态势感知,让它们能安全地穿过雾和躲避危险的十字路口盲区,从而避免可能发生的事故。
Qualcomm汽车技术讨论组
QQ群号:566131670

